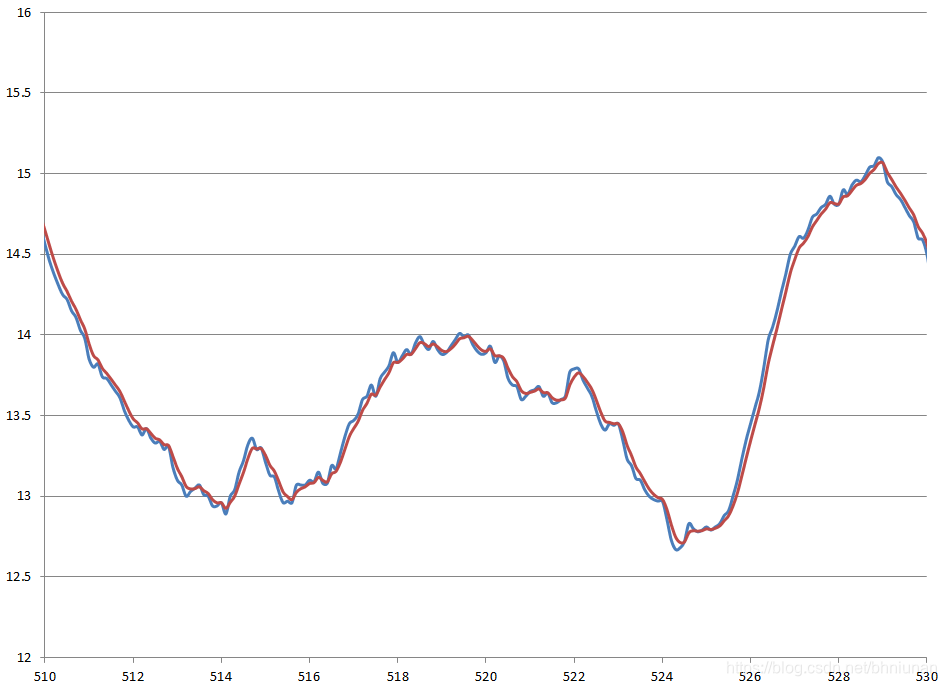
程序是一个基于RTS平滑的正弦信号滤波平滑算法的对比,Matlab中运行main.m文件即可。具体算法可以参考博客 https://blog.csdn.net/weixin_42647783/article/details/106035691。
”imukalman imugps IMU滤波算法 gps卡尔曼 gps融合imu“ 的搜索结果
1.领域:matlab,GPS+IMU的卡尔曼滤波融合定位算法算法 2.内容:【提供操作视频】基于GPS+IMU的卡尔曼滤波融合定位算法仿真,其中惯导用来进行状态预测,GPS用来滤波矫正 3.用处:用于GPS+IMU的卡尔曼滤波融合定位...
GPS仿真文件,主要是关于GPS卡尔曼滤波的,用这个可以很好的学习GPS仿真以及卡尔曼滤波的用法
基于间接卡尔曼滤波的IMU与GPS融合MATLAB仿真+含代码操作演示视频 运行注意事项:使用matlab2021a或者更高版本测试,运行里面的Runme.m文件,不要直接运行子函数文件。运行时注意matlab左侧的当前文件夹窗口必须是...
6轴加速度传感器LMS6DS3TR_C驱动程序,里面包含两种算法,计算姿态角,利用四轴上位机工具协议可发送数据显示状态。
详细卡尔曼滤波ppt,讲解详细,实用,好资料,一定要入手详细卡尔曼滤波ppt,讲解详细,实用,好资料,一定要入手
详细描述了通过卡尔曼滤波算法对GSP和imu数据进行融合
使用卡尔曼滤波对加了噪声的GPS定位数据进行滤波。
卡尔曼滤波算法 卡尔曼滤波算法
详情介绍:https://www.yuque.com/sxbn/ks/100010525 使用误差状态卡尔曼滤波器融合GPS和IMU,实现更高精度的定位
1、资源内容:基于Matlab卡尔曼滤波的IMU和GPS组合导航数据融合(源码+数据).rar 2、适用人群:计算机,电子信息工程、数学等专业的大学生课程设计、期末大作业或毕业设计中的部分功能,作为“参考资料”使用。 3、...
GPS使用卡尔曼滤波器作为跟踪环路滤波器,对导航信号进行跟踪。
卡尔曼滤波简介及其算法MATLAB实现代码,详细介绍
航位推算 因为imu更新频率很快(100Hz),假设车辆为匀速匀角速度模型,分别为v和w,模型如下: GPS坐标变换 GPS原始输出定位是基于WGS-84坐标的经纬度信息。...GPS/IMU耦合方式 分为松耦合和紧耦合方

然而,如果IKF估计的位置信息与GPS的位置信息有较大的偏差,那可能说明我们的融合系统有一些问题,如过程噪声和测量噪声的协方差矩阵选择不合适,或者误差状态模型不准确等。接着,我们生成了含有噪声的位置数据,这...
6轴加速度传感器LMS6DS3TR_C驱动程序,里面包含两种算法,计算姿态角,利用四轴上位机工具协议可发送数据显示状态。

基于间接卡尔曼滤波的IMU与GPS融合MATLAB仿真-IMU与GPS数据由仿真生成.zip本资源中的源码都是经过本地编译过可运行的,评审分达到95分以上。资源项目的难度比较适中,内容都是经过助教老师审定过的能够满足学习、...
1 ADC采样模型 假设ADC采样的值已经为稳定状态,设k+1k+1k+1时刻ADC采样值为Xk+1Xk+1X_{k+1},则kkk时刻ADC采样值为XkXkX_k,假设k+1k+1k+1时刻的采样值为Zk+1Zk+1Z_{k+1},则有: {Xk+1=Xk,Zk+1=Xk+1+δ,δ为...
文件里有GPS静态数据,进行卡尔曼滤波器设计
卡尔曼滤波与融合算法
标签: 学习
卡尔曼滤波器
卡尔曼滤波算法,卡尔曼滤波算法matlab实现,matlab源码
标准的卡尔曼滤波算法,MATLAB上完美实现,注释完整,拿走不谢

本文将介绍基于卡尔曼滤波的GPS+IMU两个传感器滤波融合定位技术。首先,让我们来了解一下GPS和IMU两种传感器的特点。GPS传感器通过接收卫星信号来获取位置信息,但在城市峡谷、密集林木等遮挡物较多的环境下,GPS...
推荐文章
- C++语法基础--标准库类型--bitset-程序员宅基地
- [C++] 第三方线程池库BS::thread_pool介绍和使用-程序员宅基地
- 如何使用openssl dgst生成哈希、签名、验签-程序员宅基地
- ios---剪裁圆形图片方法_ios软件圆形剪裁-程序员宅基地
- No module named 'matplotlib.finance'及name 'candlestick_ochl' is not defined强力解决办法-程序员宅基地
- 基于java快递代取计算机毕业设计源码+系统+lw文档+mysql数据库+调试部署_快递企业涉及到的计算机语言-程序员宅基地
- RedisTemplate与zset redis_redistemplate zset-程序员宅基地
- 服务器虚拟化培训计划,vmware虚拟机使用培训(一)概要.ppt-程序员宅基地
- application/x-www-form-urlencoded方式对post请求传参-程序员宅基地
- 网络安全常见十大漏洞总结(原理、危害、防御)-程序员宅基地